-
1 ISS
ISS, image sensor system————————ISS, image sharpness scaleшкала четкости [резкости] изображения————————ISS, industrial security section————————ISS, industry standard specifications————————ISS, inertial subsystem————————ISS, information system section————————ISS, infrared sensor system————————ISS, infrared surveillance set————————ISS, installation support services————————ISS, Institute for Strategic Studies————————ISS, Institute of Special Studies————————ISS, instruction summary sheet————————ISS, instrumentation subsystem————————ISS, integrated satellite system————————ISS, integrated sealift study————————ISS, integrated system, schematic————————ISS, intercept surveillance station————————ISS, intermediate service school————————ISS, internal switching system————————ISS, interservice supply support————————ISS, interservice support————————ISS, interstage section shellEnglish-Russian dictionary of planing, cross-planing and slotting machines > ISS
-
2 integrated system, schematic
ISS, integrated system, schematicEnglish-Russian dictionary of planing, cross-planing and slotting machines > integrated system, schematic
-
3 HMI
- человеко-машинный интерфейс
- человеко-машинное взаимодействие
- терминал
- интерфейс управления концентратором
- интерфейс "человек-машина"
интерфейс "человек-машина"
аппаратно-программная система управления технологическими процессами
HMI - это набор всех средств, позволяющих человеку вмешаться в поведение вычислительной системы. Как правило, HMI представляет собой компьютер с графическим дисплеем, где в наглядной форме отображается поведение системы, и пользователь имеет возможность вмешаться в деятельность системы. Однако в качестве HMI может выступать самый простой пульт из набора тумблеров и светодиодных индикаторов.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
интерфейс управления концентратором
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
терминал
Устройство ввода-вывода, обеспечивающее взаимодействие пользователей в локальной вычислительной сети или с удаленной ЭВМ через средства телеобработки данных
[ ГОСТ 25868-91]
[ ГОСТ Р 50304-92 ]Параллельные тексты EN-RU
HMI port warning
[Schneider Electric]Предупредительное состояние об ошибке обмена данными через порт связи с терминалом оператора
[Перевод Интент]HMI display max current phase enable
[Schneider Electric]Разрешается отображение на терминале оператора максимального линейного тока
[Перевод Интент]Config via HMI keypad enable
[Schneider Electric]Конфигурирование (системы) с помощью клавиатуры терминала оператора
[Перевод Интент]
Тематики
- оборуд. перифер. систем обраб. информации
- системы для сопряж. радиоэлектр. средств интерфейсные
Обобщающие термины
Синонимы
EN
человеко-машинное взаимодействие
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > HMI
4 man-machine communication
связь человек-машина
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > man-machine communication
5 man-machine interface
- человеко-машинный интерфейс
- интерфейс "человекмашина"
интерфейс "человекмашина"
(МСЭ-Т Q.1741).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > man-machine interface
6 MMI
- человеко-машинный интерфейс
- интерфейс "человекмашина"
интерфейс "человекмашина"
(МСЭ-Т Q.1741).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > MMI
7 human interface
интерфейс с пользователем
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human interface
8 human-computer interface
интерфейс человек-машина
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
пользовательский интерфейс
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human-computer interface
9 Chi
Хи
22-я буква греческого алфавита.
[http://www.rfcmd.ru/glossword/1.8/index.php?a=index&d=23]Тематики
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > Chi
10 computer human interface
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > computer human interface
11 human interface device
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human interface device
12 human-machine interface
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human-machine interface
13 operator-machine communication
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > operator-machine communication
14 RP
- частота ремонта
- удаленная точка
- точка, в которой пересекаются источники многоадресной передачи и члены групп
- релейная защита
- рекомендуемые технологии
- рекомендуемые методы
- реактивная мощность (вар)
- реактивная мощность
- радиологическая защита
- проект ядерного реактора
- программа обеспечения надёжности
- правила выполнения работ
- относительное (ксеноновое) отравление ядерного реактора
- небуферизованный отчет (функциональная связь)
- исполнитель маршрутизации
- армированный пластик
исполнитель маршрутизации
Вычислительный объект, который связан с зоной маршрутизации и обеспечивает абстрактное представление услуги маршрутизации для зоны маршрутизации (МСЭ-T G.709/ Y.1353).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
небуферизованный отчет (функциональная связь)
—
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]]Тематики
EN
относительное (ксеноновое) отравление ядерного реактора
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
правила выполнения работ
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программа обеспечения надёжности
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
проект ядерного реактора
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
реактивная мощность
Величина, равная при синусоидальных электрическом токе и электрическом напряжении произведению действующего значения напряжения на действующее значение тока и на синус сдвига фаз между напряжением и током двухполюсника.
[ ГОСТ Р 52002-2003]ПРИРОДА РЕАКТИВНОЙ МОЩНОСТИ
Реактивная мощность возникает только в сетях переменного тока.
Реактивная мощность имеет следующую природу.
При прохождении по проводнику (по электричекой цепи) переменного тока возникает переменный магнитный поток, изменяющийся с частотой протекающего тока. Вследствие пересечения проводника своим же собственным магнитным полем в нем возникает индуктированная электродвижущая сила (эдс), которую называют эдс самоиндукции.Эдс самоиндукции имеет реактивный характер. Это означает, что при увеличении тока в цепи эдс самоиндукции будет направлена против эдс источника питания и таким образом будет противодействовать увеличению тока. И наоборот, при уменьшении тока в цепи эдс самоиндукции будет поддерживать убывающий ток (правило Ленца).
В цепи переменного тока непрерывно возникает эдс самоиндукции, поскольку ток в цепи непрерывно изменяется.
Эдс самоиндукции зависит от скорости изменения тока в цепи и от индуктивности этой цепи (т. е. от индуктивности элементов этой цепи, т. е. от числа витков, наличия стальных сердечников).
Недопустимые, нерекомендуемые
Тематики
Близкие понятия
Действия
Синонимы
Сопутствующие термины
EN
реактивная мощность (вар)
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
рекомендуемые технологии
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
защита
Совокупность устройств, предназначенных для обнаружения повреждений или других анормальных режимов в энергосистеме, отключения повреждения, прекращения анормальных режимов и подачи команд или сигналов.
Примечания:
1) Термин «защита» является общим термином для устройств защиты или систем защиты.
2) Термин «защита» может употребляться для описания защиты целой энергосистемы или защиты отдельной установки в энергосистеме, например: защита трансформатора, защита линии, защита генератора.
3) Защита не включает в себя оборудование установки энергосистемы, предназначенное, например, для ограничения перенапряжений в энергосистеме. Однако, она включает в себя оборудование, предназначенное для управления отклонениями напряжения или частоты в энергосистеме, такое как оборудование для автоматического управления реакторами для автоматической разгрузки и т.п.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
релейная защита
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]
релейная защита
релейная защита электрических систем
Совокупность устройств (или отдельное устройство), содержащая реле и способная реагировать на короткие замыкания (КЗ) в различных элементах электрической системы — автоматически выявлять и отключать поврежденный участок. В ряде случаев Р. з. может реагировать и на др. нарушения нормального режима работы системы (например, на повышение тока, напряжения) — включать сигнализацию или (реже) отключать соответствующий элемент системы. КЗ — основной вид повреждений в электрических системах как по частоте возникновения, так и по масштабам отрицательных последствий. При КЗ наступает резкое и неравномерное понижение напряжения в системе и значительное увеличение тока в отдельных её элементах, что в конечном счёте может привести к прекращению электроснабжения потребителей и разрушению оборудования. Применение Р. з. сводит вредные последствия КЗ к минимуму.
Р. з. срабатывает при изменениях определённых электрических величин. Чаще всего встречается Р. з., реагирующая на повышение тока (токовая защита). Нередко в качестве воздействующей величины используют напряжение. Применяют также Р. з., реагирующую на снижение отношения напряжения к току, которое пропорционально расстоянию (дистанции) от Р. з. до места КЗ (дистанционная защита). Обычно устройства Р. з. изолированы от системы; информация об электрических величинах поступает на них от измерительных трансформаторов тока или напряжения либо от др. измерительных преобразователей.
Как правило, каждый элемент электрической системы (генератор, трансформатор, линию электропередачи и т.д.) оборудуют отдельными устройствами Р. з. Защита системы в целом обеспечивается комплексной селективной Р. з., при этом отключение поврежденного элемента осуществляется вполне определённым устройством Р. з., а остальные устройства, получая информацию о КЗ, не срабатывают. Такая Р. з. должна срабатывать при КЗ, внутренних по отношению к защищаемому элементу, не срабатывать при внешних, а также не срабатывать в отсутствии КЗ.
Селективность (избирательность) Р. з. характеризуется протяжённостью зоны срабатывания защиты (при КЗ в пределах этой зоны Р. з. срабатывает с заданным быстродействием) и видами режимов работы системы, при которых предусматривается её несрабатывание. В зависимости от уровня селективности при внешних КЗ принято делить Р. з. на абсолютно селективные, не срабатывающие при любых внешних КЗ, относительно селективные, срабатывание которых при внешних КЗ предусмотрено только в случае отказа защиты или выключателя смежного поврежденного элемента, и неселективные, срабатывание которых допускается (в целях упрощения) при внешних КЗ в границах некоторой зоны. Наиболее распространены относительно селективные Р. з. Любая Р. з. должна удовлетворять требованиям устойчивости функционирования, характеризующейся совершенством способов "распознавания" защитой режима работы электрической системы, и надёжности функционирования, определяющейся в первую очередь отсутствием отказов устройств Р. з.
Один из простейших путей достижения селективности Р. з. (обычно токовых и дистанционных) — применение реле, в которых между моментом возникновения требования о срабатывании реле и завершением процесса срабатывания проходит строго определённый промежуток времени, называется выдержкой времени (см. Реле времени).
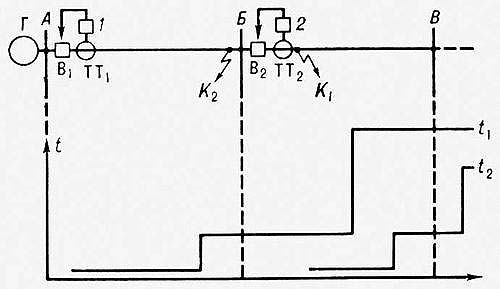
На рис. 1 показаны схема участка радиальной электрической сети с односторонним питанием (при котором ток к месту КЗ идёт с одной стороны), оснащенного относительно селективной Р. з., и соответствующие выдержки времени. Устройства Р. з. 1 и 2 имеют по три ступени, каждая из которых настроена на определённые значения входного сигнала т. о., что выдержка времени этих устройств ступенчато зависит от расстояния до места КЗ. Протяжённость зон, защищаемых отдельными ступенями, и соответствующие им выдержки времени выбираются с таким расчётом, чтобы устройства защиты поврежденных участков сети срабатывали раньше др. устройств. Зону первой ступени Р. з., не имеющей специального замедления срабатывания, приходится принимать несколько меньшей защищаемого участка, поскольку, например, устройство 1 не способно различить КЗ в точках K1 и K2. Последние ступени Р. з. (в Р. з., показанной на рис. 1, — третьи) — резервные, у них часто нет четко ограниченной зоны срабатывания.

В сетях, в которых ток к месту КЗ может идти с двух сторон (от разных источников питания или по обходной связи), относительно селективные Р. з. выполняют направленными — срабатывающими только тогда, когда мощность КЗ передаётся через защищаемые элементы в условном направлении от шин ближайшей подстанции в линию. Так, при КЗ в точке К (рис. 2) могут сработать только устройства 1, 3, 4 и 6. При этом устройства 1 и 3 (4 и 6) для обеспечения селективности согласованы между собой по зонам срабатывания и выдержкам времени.
В ряде случаев — на достаточно мощных генераторах, трансформаторах, линиях напряжением 110 кв и выше — для обеспечения высокого быстродействия Р. з. применяют сравнительно сложные абсолютно селективные защиты. Из них наиболее распространены т. н. продольные защиты, к которым для распознавания КЗ, в конце "своего" и в начале смежного участков подводится информация с разных концов элемента. Так, продольная дифференциальная токовая защита реагирует на геометрическую разность векторов токов на концах элемента. Эта разность при внешнем КЗ теоретически равна нулю, а при внутреннем — току в месте КЗ. В защитах др. типов производится сопоставление фаз векторов тока (дифференциально-фазная защита) или направлений потока мощности на концах элемента. К продольным защитам электрических машин и линий длиной примерно до 10 км информация об изменении электрических величин поступает непосредственно по соединительным проводам. На более длинных линиях для передачи такой информации обычно используют ВЧ каналы связи по проводам самой линии, а также УКВ каналы радиосвязи и радиорелейные линии.
Э. П. Смирнов.
[БСЭ, 1969-1978]НАЗНАЧЕНИЕ РЕЛЕЙНОЙ ЗАЩИТЫ
В энергетических системах могут возникать повреждения и ненормальные режимы работы электрооборудования электростанций и подстанций, их распределительных устройств, линий электропередачи и электроустановок потребителей электрической энергии.
Повреждения в большинстве случаев сопровождаются значительным увеличением тока и глубоким понижением напряжения в элементах энергосистемы.
Повышенный ток выделяет большое количество тепла, вызывающее разрушения в месте повреждения и опасный нагрев неповрежденных линий и оборудования, по которым этот ток проходит.
Понижение напряжения нарушает нормальную работу потребителей электроэнергии и устойчивость параллельной работы генераторов и энергосистемы в целом.
Ненормальные режимы обычно приводят к отклонению величин напряжения, тока и частоты от допустимых значений. При понижении частоты и напряжения создается опасность нарушения нормальной работы потребителей и устойчивости энергосистемы, а повышение напряжения и тока угрожает повреждением оборудования и линий электропередачи.
Таким образом, повреждения нарушают работу энергосистемы и потребителей электроэнергии, а ненормальные режимы создают возможность возникновения повреждений или расстройства работы энергосистемы.
Для обеспечения нормальной работы энергетической системы и потребителей электроэнергии необходимо возможно быстрее выявлять и отделять место повреждения от неповрежденной сети, восстанавливая таким путем нормальные условия их работы и прекращая разрушения в месте повреждения.
Опасные последствия ненормальных режимов также можно предотвратить, если своевременно обнаружить отклонение от нормального режима и принять меры к его устранению (например, снизить ток при его возрастании, понизить напряжение при его увеличении и т. д.).
В связи с этим возникает необходимость в создании и применении автоматических устройств, выполняющих указанные операции и защищающих систему и ее элементы от опасных последствий повреждений и ненормальных режимов.
Первоначально в качестве подобной защиты применялись плавкие предохранители. Однако по мере роста мощности и напряжения электрических установок и усложнения их схем коммутации такой способ защиты стал недостаточным, в силу чего были созданы защитные устройства, выполняемые при помощи специальных автоматов — реле, получившие название релейной защиты.
Релейная защита является основным видом электрической автоматики, без которой невозможна нормальная и надежная работа современных энергетических систем. Она осуществляет непрерывный контроль за состоянием и режимом работы всех элементов энергосистемы и реагирует на возникновение повреждений и ненормальных режимов.
При возникновении повреждений защита выявляет и отключает от системы поврежденный участок, воздействуя на специальные силовые выключатели, предназначенные для размыкания токов повреждения.
При возникновении ненормальных режимов защита выявляет их и в зависимости от характера нарушения производит операции, необходимые для восстановления нормального режима, или подает сигнал дежурному персоналу.
В современных электрических системах релейная защита тесно связана с электрической автоматикой, предназначенной для быстрого автоматического восстановления нормального режима и питания потребителей.
К основным устройствам такой автоматики относятся:- автоматы повторного включения (АПВ),
- автоматы включения резервных источников питания и оборудования (АВР),
- автоматы частотной разгрузки (АЧР).
[Чернобровов Н. В. Релейная защита. Учебное пособие для техникумов]
Тематики
Синонимы
EN
точка, в которой пересекаются источники многоадресной передачи и члены групп
Передаваемые из источников многоадресной передачи пакеты распространяются через маршрутизатор RP в начале многоадресной передачи (МСЭ-Т J.283).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
удаленная точка
Опорная точка, в которой выходной сигнал функции приемника завершения трассы на окончании двусторонней трассы подается на вход ее функции источника, с целью передачи информации на удаленный конец. (МСЭ-T G.806).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
частота ремонта
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
- repair rate
- RP
- RR
Англо-русский словарь нормативно-технической терминологии > RP
15 protection
- степень защиты (обеспечиваемая оболочкой)
- репарация
- релейная защита
- охрана
- защита (в геотекстильных материалах)
- защита
защита
Предотвращение или ограничение местных повреждений элемента или материала путем использования геотекстильного или геотекстилеподобного материала.
[ ГОСТ Р 53225-2008]Тематики
EN
FR
охрана
ограждение
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
EN
защита
Совокупность устройств, предназначенных для обнаружения повреждений или других анормальных режимов в энергосистеме, отключения повреждения, прекращения анормальных режимов и подачи команд или сигналов.
Примечания:
1) Термин «защита» является общим термином для устройств защиты или систем защиты.
2) Термин «защита» может употребляться для описания защиты целой энергосистемы или защиты отдельной установки в энергосистеме, например: защита трансформатора, защита линии, защита генератора.
3) Защита не включает в себя оборудование установки энергосистемы, предназначенное, например, для ограничения перенапряжений в энергосистеме. Однако, она включает в себя оборудование, предназначенное для управления отклонениями напряжения или частоты в энергосистеме, такое как оборудование для автоматического управления реакторами для автоматической разгрузки и т.п.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
релейная защита
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]
релейная защита
релейная защита электрических систем
Совокупность устройств (или отдельное устройство), содержащая реле и способная реагировать на короткие замыкания (КЗ) в различных элементах электрической системы — автоматически выявлять и отключать поврежденный участок. В ряде случаев Р. з. может реагировать и на др. нарушения нормального режима работы системы (например, на повышение тока, напряжения) — включать сигнализацию или (реже) отключать соответствующий элемент системы. КЗ — основной вид повреждений в электрических системах как по частоте возникновения, так и по масштабам отрицательных последствий. При КЗ наступает резкое и неравномерное понижение напряжения в системе и значительное увеличение тока в отдельных её элементах, что в конечном счёте может привести к прекращению электроснабжения потребителей и разрушению оборудования. Применение Р. з. сводит вредные последствия КЗ к минимуму.
Р. з. срабатывает при изменениях определённых электрических величин. Чаще всего встречается Р. з., реагирующая на повышение тока (токовая защита). Нередко в качестве воздействующей величины используют напряжение. Применяют также Р. з., реагирующую на снижение отношения напряжения к току, которое пропорционально расстоянию (дистанции) от Р. з. до места КЗ (дистанционная защита). Обычно устройства Р. з. изолированы от системы; информация об электрических величинах поступает на них от измерительных трансформаторов тока или напряжения либо от др. измерительных преобразователей.
Как правило, каждый элемент электрической системы (генератор, трансформатор, линию электропередачи и т.д.) оборудуют отдельными устройствами Р. з. Защита системы в целом обеспечивается комплексной селективной Р. з., при этом отключение поврежденного элемента осуществляется вполне определённым устройством Р. з., а остальные устройства, получая информацию о КЗ, не срабатывают. Такая Р. з. должна срабатывать при КЗ, внутренних по отношению к защищаемому элементу, не срабатывать при внешних, а также не срабатывать в отсутствии КЗ.
Селективность (избирательность) Р. з. характеризуется протяжённостью зоны срабатывания защиты (при КЗ в пределах этой зоны Р. з. срабатывает с заданным быстродействием) и видами режимов работы системы, при которых предусматривается её несрабатывание. В зависимости от уровня селективности при внешних КЗ принято делить Р. з. на абсолютно селективные, не срабатывающие при любых внешних КЗ, относительно селективные, срабатывание которых при внешних КЗ предусмотрено только в случае отказа защиты или выключателя смежного поврежденного элемента, и неселективные, срабатывание которых допускается (в целях упрощения) при внешних КЗ в границах некоторой зоны. Наиболее распространены относительно селективные Р. з. Любая Р. з. должна удовлетворять требованиям устойчивости функционирования, характеризующейся совершенством способов "распознавания" защитой режима работы электрической системы, и надёжности функционирования, определяющейся в первую очередь отсутствием отказов устройств Р. з.
Один из простейших путей достижения селективности Р. з. (обычно токовых и дистанционных) — применение реле, в которых между моментом возникновения требования о срабатывании реле и завершением процесса срабатывания проходит строго определённый промежуток времени, называется выдержкой времени (см. Реле времени).
На рис. 1 показаны схема участка радиальной электрической сети с односторонним питанием (при котором ток к месту КЗ идёт с одной стороны), оснащенного относительно селективной Р. з., и соответствующие выдержки времени. Устройства Р. з. 1 и 2 имеют по три ступени, каждая из которых настроена на определённые значения входного сигнала т. о., что выдержка времени этих устройств ступенчато зависит от расстояния до места КЗ. Протяжённость зон, защищаемых отдельными ступенями, и соответствующие им выдержки времени выбираются с таким расчётом, чтобы устройства защиты поврежденных участков сети срабатывали раньше др. устройств. Зону первой ступени Р. з., не имеющей специального замедления срабатывания, приходится принимать несколько меньшей защищаемого участка, поскольку, например, устройство 1 не способно различить КЗ в точках K1 и K2. Последние ступени Р. з. (в Р. з., показанной на рис. 1, — третьи) — резервные, у них часто нет четко ограниченной зоны срабатывания.
В сетях, в которых ток к месту КЗ может идти с двух сторон (от разных источников питания или по обходной связи), относительно селективные Р. з. выполняют направленными — срабатывающими только тогда, когда мощность КЗ передаётся через защищаемые элементы в условном направлении от шин ближайшей подстанции в линию. Так, при КЗ в точке К (рис. 2) могут сработать только устройства 1, 3, 4 и 6. При этом устройства 1 и 3 (4 и 6) для обеспечения селективности согласованы между собой по зонам срабатывания и выдержкам времени.
В ряде случаев — на достаточно мощных генераторах, трансформаторах, линиях напряжением 110 кв и выше — для обеспечения высокого быстродействия Р. з. применяют сравнительно сложные абсолютно селективные защиты. Из них наиболее распространены т. н. продольные защиты, к которым для распознавания КЗ, в конце "своего" и в начале смежного участков подводится информация с разных концов элемента. Так, продольная дифференциальная токовая защита реагирует на геометрическую разность векторов токов на концах элемента. Эта разность при внешнем КЗ теоретически равна нулю, а при внутреннем — току в месте КЗ. В защитах др. типов производится сопоставление фаз векторов тока (дифференциально-фазная защита) или направлений потока мощности на концах элемента. К продольным защитам электрических машин и линий длиной примерно до 10 км информация об изменении электрических величин поступает непосредственно по соединительным проводам. На более длинных линиях для передачи такой информации обычно используют ВЧ каналы связи по проводам самой линии, а также УКВ каналы радиосвязи и радиорелейные линии.
Э. П. Смирнов.
[БСЭ, 1969-1978]НАЗНАЧЕНИЕ РЕЛЕЙНОЙ ЗАЩИТЫ
В энергетических системах могут возникать повреждения и ненормальные режимы работы электрооборудования электростанций и подстанций, их распределительных устройств, линий электропередачи и электроустановок потребителей электрической энергии.
Повреждения в большинстве случаев сопровождаются значительным увеличением тока и глубоким понижением напряжения в элементах энергосистемы.
Повышенный ток выделяет большое количество тепла, вызывающее разрушения в месте повреждения и опасный нагрев неповрежденных линий и оборудования, по которым этот ток проходит.
Понижение напряжения нарушает нормальную работу потребителей электроэнергии и устойчивость параллельной работы генераторов и энергосистемы в целом.
Ненормальные режимы обычно приводят к отклонению величин напряжения, тока и частоты от допустимых значений. При понижении частоты и напряжения создается опасность нарушения нормальной работы потребителей и устойчивости энергосистемы, а повышение напряжения и тока угрожает повреждением оборудования и линий электропередачи.
Таким образом, повреждения нарушают работу энергосистемы и потребителей электроэнергии, а ненормальные режимы создают возможность возникновения повреждений или расстройства работы энергосистемы.
Для обеспечения нормальной работы энергетической системы и потребителей электроэнергии необходимо возможно быстрее выявлять и отделять место повреждения от неповрежденной сети, восстанавливая таким путем нормальные условия их работы и прекращая разрушения в месте повреждения.
Опасные последствия ненормальных режимов также можно предотвратить, если своевременно обнаружить отклонение от нормального режима и принять меры к его устранению (например, снизить ток при его возрастании, понизить напряжение при его увеличении и т. д.).
В связи с этим возникает необходимость в создании и применении автоматических устройств, выполняющих указанные операции и защищающих систему и ее элементы от опасных последствий повреждений и ненормальных режимов.
Первоначально в качестве подобной защиты применялись плавкие предохранители. Однако по мере роста мощности и напряжения электрических установок и усложнения их схем коммутации такой способ защиты стал недостаточным, в силу чего были созданы защитные устройства, выполняемые при помощи специальных автоматов — реле, получившие название релейной защиты.
Релейная защита является основным видом электрической автоматики, без которой невозможна нормальная и надежная работа современных энергетических систем. Она осуществляет непрерывный контроль за состоянием и режимом работы всех элементов энергосистемы и реагирует на возникновение повреждений и ненормальных режимов.
При возникновении повреждений защита выявляет и отключает от системы поврежденный участок, воздействуя на специальные силовые выключатели, предназначенные для размыкания токов повреждения.
При возникновении ненормальных режимов защита выявляет их и в зависимости от характера нарушения производит операции, необходимые для восстановления нормального режима, или подает сигнал дежурному персоналу.
В современных электрических системах релейная защита тесно связана с электрической автоматикой, предназначенной для быстрого автоматического восстановления нормального режима и питания потребителей.
К основным устройствам такой автоматики относятся:- автоматы повторного включения (АПВ),
- автоматы включения резервных источников питания и оборудования (АВР),
- автоматы частотной разгрузки (АЧР).
[Чернобровов Н. В. Релейная защита. Учебное пособие для техникумов]
Тематики
Синонимы
EN
репарация
репаративный синтез
Восстанавление нативной первичной структуры молекулы ДНК (т.е. исправление повреждений, спонтанно возникающих в процессе репликации и рекомбинации или вызванных действием внешних факторов); различают фотореактивацию, эксцизионную и пострепликативную Р.; Р. осуществляется с помощью набора специфических репаративных ферментов; дефектность Р. ДНК наблюдается при некоторых НЗЧ - пигментной ксеродерме, атаксии-телангиэктазии, анемии Фанкони, трихотиодистрофии и др.
[Арефьев В.А., Лисовенко Л.А. Англо-русский толковый словарь генетических терминов 1995 407с.]Тематики
Синонимы
EN
степень защиты
Способ защиты, обеспечиваемый оболочкой от доступа к опасным частям, попадания внешних твердых предметов и (или) воды и проверяемый стандартными методами испытаний.
[ ГОСТ 14254-96( МЭК 529-89)]
степень защиты, обеспечиваемая оболочкой (IP)
Числовые обозначения после кода IP, которые в соответствии с МЭК 60529 [12] характеризуют оболочку электрооборудования, обеспечивающую:
- защиту персонала от прикасания или доступа к находящимся под напряжением или движущимся частям (за исключением гладких вращающихся валов и т.п.), расположенным внутри оболочки;
- защиту электрооборудования от проникания в него твердых посторонних тел и,
- если указано в обозначении, защиту электрооборудования от вредного проникания воды.
[ ГОСТ Р МЭК 60050-426-2006]EN
degree of protection of enclosure
IP (abbreviation)
numerical classification according to IEC 60529 preceded by the symbol IP applied to the enclosure of electrical apparatus to provide:
– protection of persons against contact with, or approach to, live parts and against contact with moving parts (other than smooth rotating shafts and the like) inside the enclosure,
– protection of the electrical apparatus against ingress of solid foreign objects, and
– where indicated by the classification, protection of the electrical apparatus against harmful ingress of water
[IEV number 426-04-02 ]FR
degré de protection procuré par une enveloppe
IP (abréviation)
classification numérique selon la CEI 60529, précédée du symbole IP, appliquée à une enveloppe de matériel électrique pour apporter:
– une protection des personnes contre tout contact ou proximité avec des parties actives et contre tout contact avec une pièce mobile (autre que les roulements en faible rotation) à l'intérieur d'une enveloppe
– une protection du matériel électrique contre la pénétration de corps solide étrangers, et
– selon l’indication donnée par la classification, une protection du matériel électrique contre la pénétration dangereuse de l’eau
[IEV number 426-04-02 ]Элементы кода IP и их обозначения по ГОСТ 14254-96( МЭК 529-89)
Цифры кода IP
Значение для защиты оборудования от проникновения внешних твердых предметов
Значение для защиты людей от доступа к опасным частям
Первая характеристическая цифра
0
Нет защиты
Нет защиты
1
диаметром ≥ 50 мм
тыльной стороной руки
2
диаметром ≥ 12,5 мм
пальцем
3
диаметром ≥ 2,5 мм
инструментом
4
диаметром ≥ 1,0 мм
проволокой
5
пылезащищенное
проволокой
6
пыленепроницаемое
проволокой
От вредного воздействия в результате проникновения воды
Вторая характеристическая цифра
0
Нет защиты
-
1
Вертикальное каплепадение
2
Каплепадение (номинальный угол 15°)
3
Дождевание
4
Сплошное обрызгивание
5
Действие струи
6
Сильное действие струи
7
Временное непродолжительное погружение
8
Длительное погружение
Дополнительная буква (при необходимости)
-
От доступа к опасным частям
A
тыльной стороной руки
B
пальцем
C
инструментом
проволокой
Вспомогательная буква (при необходимости)
Вспомогательная информация относящаяся к:
-
H
высоковольтным аппаратам
M
состоянию движения во время испытаний защиты от воды
S
состоянию неподвижности во время испытаний защиты от воды
W
Требования в части стойкости оболочек и электрооборудования в целом к климатическим, механическим внешним воздействующим факторам (ВВФ) и специальным средам (кроме проникновения внешних твердых предметов и воды) установлены вне рамок настоящего стандарта.
Параллельные тексты EN-RU
The code IP indicates the degrees of protection provided by an enclosure against access to hazardous parts, ingress of solid foreign objects and ingress of water.
The degree of protection of an enclosure is identified, in compliance with the specifications of the Standard IEC 60529, by the code letters IP (International Protection) followed by two numerals and two additional letters.
The first characteristic numeral indicates the degree of protection against ingress of solid foreign objects and against contact of persons with hazardous live parts inside the enclosure.
The second characteristic numeral indicates the degree of protection against ingress of water with harmful effects.
[ABB]Код IP обозначает степень защиты, обеспечиваемую оболочкой от попадания внутрь твердых посторонних предметов и воды.
Степень защиты оболочки обозначается в соответствии со стандартом МЭК 60529 буквенным обозначением IP (International Protection, т. е. Международная защита) после которого следуют две цифры, к которым в некоторых случаях добавляются еще две буквы.
Первая характеристическая цифра обозначает степень защиты от проникновения твердых посторонних предметов и от контакта людей с находящимися внутри оболочки опасными токоведущими частями.
Вторая характеристическая цифра обозначает степень защиты оболочки с точки зрения вредного воздействия, оказываемого проникновением воды.
[Перевод Интент]The protection of enclosures against ingress of dirt or against the ingress of water is defined in IEC529 (BSEN60529:1991). Conversely, an enclosure which protects equipment against ingress of particles will also protect a person from potential hazards within that enclosure, and this degree of protection is also defined as a standard.
The degrees of protection are most commonly expressed as ‘IP’ followed by two numbers, e.g. IP65, where the numbers define the degree of protection. The first digit shows the extent to which the equipment is protected against particles, or to which persons are protected from enclosed hazards. The second digit indicates the extent of protection against water.
The wording in the table is not exactly as used in the standards document, but the dimensions are accurateIP Degree of Protection according to EN/IEC 60529
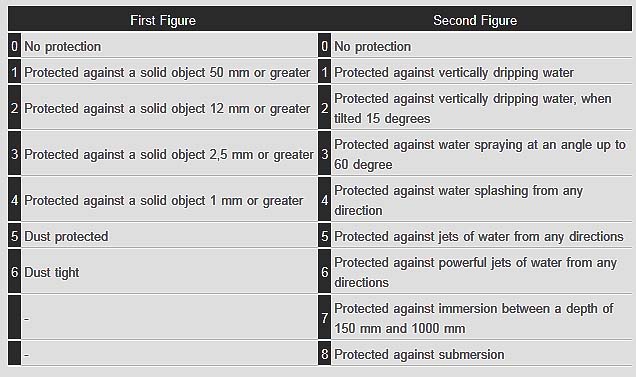
Correlations between IP (IEC) and NEMA 250 standards
IP10 -> NEMA 1
IP11 -> NEMA 2
IP54 -> NEMA 3 R
IP52 -> NEMA 5-12-12 K
IP54 -> NEMA 3-3 S
IP56 -> NEMA 4-4 X
IP67 -> NEMA 6-6 P[ http://electrical-engineering-portal.com/ip-protection-degree-iec-60529-explained]
Тематики
- безопасность машин и труда в целом
- электробезопасность
- электротехника, основные понятия
Действия
- степень защиты
- степень защиты, обеспечиваемая оболочкой
- степень защиты, обеспечиваемая оболочкой (код IP)
EN
- amount of protection
- degree of protection IP
- degree of protection of an enclosure
- degree of protection of enclosure
- degree of protection provided by enclosure
- enclosure rating
- ingress protection rating
- IP
- IP degree of protection,
- IP rating
- IP Sealing Specification
- IP security
- IPSec
- level of protection
- mechanical rating
- protection
- protection index
- protection rating
DE
- IP-Schutzgrad, m
- Schutzart des Gehäuses, f
FR
2.2.8 защита (protection): Предохранение поверхности объекта от возможных повреждений.
Англо-русский словарь нормативно-технической терминологии > protection
16 relaying
передача эстафеты
Элемент техники эстафетного бега.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]EN
relaying
Element of relay race technique.
relay
exchange
Another term for relaying.
hand-over
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]Тематики
EN
постановка релейной защиты
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
применение реле
релейное управление
релейная защита
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
защита
Совокупность устройств, предназначенных для обнаружения повреждений или других анормальных режимов в энергосистеме, отключения повреждения, прекращения анормальных режимов и подачи команд или сигналов.
Примечания:
1) Термин «защита» является общим термином для устройств защиты или систем защиты.
2) Термин «защита» может употребляться для описания защиты целой энергосистемы или защиты отдельной установки в энергосистеме, например: защита трансформатора, защита линии, защита генератора.
3) Защита не включает в себя оборудование установки энергосистемы, предназначенное, например, для ограничения перенапряжений в энергосистеме. Однако, она включает в себя оборудование, предназначенное для управления отклонениями напряжения или частоты в энергосистеме, такое как оборудование для автоматического управления реакторами для автоматической разгрузки и т.п.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
релейная защита
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]
релейная защита
релейная защита электрических систем
Совокупность устройств (или отдельное устройство), содержащая реле и способная реагировать на короткие замыкания (КЗ) в различных элементах электрической системы — автоматически выявлять и отключать поврежденный участок. В ряде случаев Р. з. может реагировать и на др. нарушения нормального режима работы системы (например, на повышение тока, напряжения) — включать сигнализацию или (реже) отключать соответствующий элемент системы. КЗ — основной вид повреждений в электрических системах как по частоте возникновения, так и по масштабам отрицательных последствий. При КЗ наступает резкое и неравномерное понижение напряжения в системе и значительное увеличение тока в отдельных её элементах, что в конечном счёте может привести к прекращению электроснабжения потребителей и разрушению оборудования. Применение Р. з. сводит вредные последствия КЗ к минимуму.
Р. з. срабатывает при изменениях определённых электрических величин. Чаще всего встречается Р. з., реагирующая на повышение тока (токовая защита). Нередко в качестве воздействующей величины используют напряжение. Применяют также Р. з., реагирующую на снижение отношения напряжения к току, которое пропорционально расстоянию (дистанции) от Р. з. до места КЗ (дистанционная защита). Обычно устройства Р. з. изолированы от системы; информация об электрических величинах поступает на них от измерительных трансформаторов тока или напряжения либо от др. измерительных преобразователей.
Как правило, каждый элемент электрической системы (генератор, трансформатор, линию электропередачи и т.д.) оборудуют отдельными устройствами Р. з. Защита системы в целом обеспечивается комплексной селективной Р. з., при этом отключение поврежденного элемента осуществляется вполне определённым устройством Р. з., а остальные устройства, получая информацию о КЗ, не срабатывают. Такая Р. з. должна срабатывать при КЗ, внутренних по отношению к защищаемому элементу, не срабатывать при внешних, а также не срабатывать в отсутствии КЗ.
Селективность (избирательность) Р. з. характеризуется протяжённостью зоны срабатывания защиты (при КЗ в пределах этой зоны Р. з. срабатывает с заданным быстродействием) и видами режимов работы системы, при которых предусматривается её несрабатывание. В зависимости от уровня селективности при внешних КЗ принято делить Р. з. на абсолютно селективные, не срабатывающие при любых внешних КЗ, относительно селективные, срабатывание которых при внешних КЗ предусмотрено только в случае отказа защиты или выключателя смежного поврежденного элемента, и неселективные, срабатывание которых допускается (в целях упрощения) при внешних КЗ в границах некоторой зоны. Наиболее распространены относительно селективные Р. з. Любая Р. з. должна удовлетворять требованиям устойчивости функционирования, характеризующейся совершенством способов "распознавания" защитой режима работы электрической системы, и надёжности функционирования, определяющейся в первую очередь отсутствием отказов устройств Р. з.
Один из простейших путей достижения селективности Р. з. (обычно токовых и дистанционных) — применение реле, в которых между моментом возникновения требования о срабатывании реле и завершением процесса срабатывания проходит строго определённый промежуток времени, называется выдержкой времени (см. Реле времени).
На рис. 1 показаны схема участка радиальной электрической сети с односторонним питанием (при котором ток к месту КЗ идёт с одной стороны), оснащенного относительно селективной Р. з., и соответствующие выдержки времени. Устройства Р. з. 1 и 2 имеют по три ступени, каждая из которых настроена на определённые значения входного сигнала т. о., что выдержка времени этих устройств ступенчато зависит от расстояния до места КЗ. Протяжённость зон, защищаемых отдельными ступенями, и соответствующие им выдержки времени выбираются с таким расчётом, чтобы устройства защиты поврежденных участков сети срабатывали раньше др. устройств. Зону первой ступени Р. з., не имеющей специального замедления срабатывания, приходится принимать несколько меньшей защищаемого участка, поскольку, например, устройство 1 не способно различить КЗ в точках K1 и K2. Последние ступени Р. з. (в Р. з., показанной на рис. 1, — третьи) — резервные, у них часто нет четко ограниченной зоны срабатывания.
В сетях, в которых ток к месту КЗ может идти с двух сторон (от разных источников питания или по обходной связи), относительно селективные Р. з. выполняют направленными — срабатывающими только тогда, когда мощность КЗ передаётся через защищаемые элементы в условном направлении от шин ближайшей подстанции в линию. Так, при КЗ в точке К (рис. 2) могут сработать только устройства 1, 3, 4 и 6. При этом устройства 1 и 3 (4 и 6) для обеспечения селективности согласованы между собой по зонам срабатывания и выдержкам времени.
В ряде случаев — на достаточно мощных генераторах, трансформаторах, линиях напряжением 110 кв и выше — для обеспечения высокого быстродействия Р. з. применяют сравнительно сложные абсолютно селективные защиты. Из них наиболее распространены т. н. продольные защиты, к которым для распознавания КЗ, в конце "своего" и в начале смежного участков подводится информация с разных концов элемента. Так, продольная дифференциальная токовая защита реагирует на геометрическую разность векторов токов на концах элемента. Эта разность при внешнем КЗ теоретически равна нулю, а при внутреннем — току в месте КЗ. В защитах др. типов производится сопоставление фаз векторов тока (дифференциально-фазная защита) или направлений потока мощности на концах элемента. К продольным защитам электрических машин и линий длиной примерно до 10 км информация об изменении электрических величин поступает непосредственно по соединительным проводам. На более длинных линиях для передачи такой информации обычно используют ВЧ каналы связи по проводам самой линии, а также УКВ каналы радиосвязи и радиорелейные линии.
Э. П. Смирнов.
[БСЭ, 1969-1978]НАЗНАЧЕНИЕ РЕЛЕЙНОЙ ЗАЩИТЫ
В энергетических системах могут возникать повреждения и ненормальные режимы работы электрооборудования электростанций и подстанций, их распределительных устройств, линий электропередачи и электроустановок потребителей электрической энергии.
Повреждения в большинстве случаев сопровождаются значительным увеличением тока и глубоким понижением напряжения в элементах энергосистемы.
Повышенный ток выделяет большое количество тепла, вызывающее разрушения в месте повреждения и опасный нагрев неповрежденных линий и оборудования, по которым этот ток проходит.
Понижение напряжения нарушает нормальную работу потребителей электроэнергии и устойчивость параллельной работы генераторов и энергосистемы в целом.
Ненормальные режимы обычно приводят к отклонению величин напряжения, тока и частоты от допустимых значений. При понижении частоты и напряжения создается опасность нарушения нормальной работы потребителей и устойчивости энергосистемы, а повышение напряжения и тока угрожает повреждением оборудования и линий электропередачи.
Таким образом, повреждения нарушают работу энергосистемы и потребителей электроэнергии, а ненормальные режимы создают возможность возникновения повреждений или расстройства работы энергосистемы.
Для обеспечения нормальной работы энергетической системы и потребителей электроэнергии необходимо возможно быстрее выявлять и отделять место повреждения от неповрежденной сети, восстанавливая таким путем нормальные условия их работы и прекращая разрушения в месте повреждения.
Опасные последствия ненормальных режимов также можно предотвратить, если своевременно обнаружить отклонение от нормального режима и принять меры к его устранению (например, снизить ток при его возрастании, понизить напряжение при его увеличении и т. д.).
В связи с этим возникает необходимость в создании и применении автоматических устройств, выполняющих указанные операции и защищающих систему и ее элементы от опасных последствий повреждений и ненормальных режимов.
Первоначально в качестве подобной защиты применялись плавкие предохранители. Однако по мере роста мощности и напряжения электрических установок и усложнения их схем коммутации такой способ защиты стал недостаточным, в силу чего были созданы защитные устройства, выполняемые при помощи специальных автоматов — реле, получившие название релейной защиты.
Релейная защита является основным видом электрической автоматики, без которой невозможна нормальная и надежная работа современных энергетических систем. Она осуществляет непрерывный контроль за состоянием и режимом работы всех элементов энергосистемы и реагирует на возникновение повреждений и ненормальных режимов.
При возникновении повреждений защита выявляет и отключает от системы поврежденный участок, воздействуя на специальные силовые выключатели, предназначенные для размыкания токов повреждения.
При возникновении ненормальных режимов защита выявляет их и в зависимости от характера нарушения производит операции, необходимые для восстановления нормального режима, или подает сигнал дежурному персоналу.
В современных электрических системах релейная защита тесно связана с электрической автоматикой, предназначенной для быстрого автоматического восстановления нормального режима и питания потребителей.
К основным устройствам такой автоматики относятся:- автоматы повторного включения (АПВ),
- автоматы включения резервных источников питания и оборудования (АВР),
- автоматы частотной разгрузки (АЧР).
[Чернобровов Н. В. Релейная защита. Учебное пособие для техникумов]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > relaying
17 protection relay
реле защиты
-
[В.А.Семенов. Англо-русский словарь по релейной защите]
реле защиты
Измерительное реле, представляющее собой самостоятельно или в сочетании с другими реле составную часть устройства защиты.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]EN
protection relay
measuring relay which, either solely or in combination with other relays, is a constituent of a protection equipment
[IEC 60050-448:1995, 448-11-02]Тематики
EN
защита
Совокупность устройств, предназначенных для обнаружения повреждений или других анормальных режимов в энергосистеме, отключения повреждения, прекращения анормальных режимов и подачи команд или сигналов.
Примечания:
1) Термин «защита» является общим термином для устройств защиты или систем защиты.
2) Термин «защита» может употребляться для описания защиты целой энергосистемы или защиты отдельной установки в энергосистеме, например: защита трансформатора, защита линии, защита генератора.
3) Защита не включает в себя оборудование установки энергосистемы, предназначенное, например, для ограничения перенапряжений в энергосистеме. Однако, она включает в себя оборудование, предназначенное для управления отклонениями напряжения или частоты в энергосистеме, такое как оборудование для автоматического управления реакторами для автоматической разгрузки и т.п.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
релейная защита
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]
релейная защита
релейная защита электрических систем
Совокупность устройств (или отдельное устройство), содержащая реле и способная реагировать на короткие замыкания (КЗ) в различных элементах электрической системы — автоматически выявлять и отключать поврежденный участок. В ряде случаев Р. з. может реагировать и на др. нарушения нормального режима работы системы (например, на повышение тока, напряжения) — включать сигнализацию или (реже) отключать соответствующий элемент системы. КЗ — основной вид повреждений в электрических системах как по частоте возникновения, так и по масштабам отрицательных последствий. При КЗ наступает резкое и неравномерное понижение напряжения в системе и значительное увеличение тока в отдельных её элементах, что в конечном счёте может привести к прекращению электроснабжения потребителей и разрушению оборудования. Применение Р. з. сводит вредные последствия КЗ к минимуму.
Р. з. срабатывает при изменениях определённых электрических величин. Чаще всего встречается Р. з., реагирующая на повышение тока (токовая защита). Нередко в качестве воздействующей величины используют напряжение. Применяют также Р. з., реагирующую на снижение отношения напряжения к току, которое пропорционально расстоянию (дистанции) от Р. з. до места КЗ (дистанционная защита). Обычно устройства Р. з. изолированы от системы; информация об электрических величинах поступает на них от измерительных трансформаторов тока или напряжения либо от др. измерительных преобразователей.
Как правило, каждый элемент электрической системы (генератор, трансформатор, линию электропередачи и т.д.) оборудуют отдельными устройствами Р. з. Защита системы в целом обеспечивается комплексной селективной Р. з., при этом отключение поврежденного элемента осуществляется вполне определённым устройством Р. з., а остальные устройства, получая информацию о КЗ, не срабатывают. Такая Р. з. должна срабатывать при КЗ, внутренних по отношению к защищаемому элементу, не срабатывать при внешних, а также не срабатывать в отсутствии КЗ.
Селективность (избирательность) Р. з. характеризуется протяжённостью зоны срабатывания защиты (при КЗ в пределах этой зоны Р. з. срабатывает с заданным быстродействием) и видами режимов работы системы, при которых предусматривается её несрабатывание. В зависимости от уровня селективности при внешних КЗ принято делить Р. з. на абсолютно селективные, не срабатывающие при любых внешних КЗ, относительно селективные, срабатывание которых при внешних КЗ предусмотрено только в случае отказа защиты или выключателя смежного поврежденного элемента, и неселективные, срабатывание которых допускается (в целях упрощения) при внешних КЗ в границах некоторой зоны. Наиболее распространены относительно селективные Р. з. Любая Р. з. должна удовлетворять требованиям устойчивости функционирования, характеризующейся совершенством способов "распознавания" защитой режима работы электрической системы, и надёжности функционирования, определяющейся в первую очередь отсутствием отказов устройств Р. з.
Один из простейших путей достижения селективности Р. з. (обычно токовых и дистанционных) — применение реле, в которых между моментом возникновения требования о срабатывании реле и завершением процесса срабатывания проходит строго определённый промежуток времени, называется выдержкой времени (см. Реле времени).
На рис. 1 показаны схема участка радиальной электрической сети с односторонним питанием (при котором ток к месту КЗ идёт с одной стороны), оснащенного относительно селективной Р. з., и соответствующие выдержки времени. Устройства Р. з. 1 и 2 имеют по три ступени, каждая из которых настроена на определённые значения входного сигнала т. о., что выдержка времени этих устройств ступенчато зависит от расстояния до места КЗ. Протяжённость зон, защищаемых отдельными ступенями, и соответствующие им выдержки времени выбираются с таким расчётом, чтобы устройства защиты поврежденных участков сети срабатывали раньше др. устройств. Зону первой ступени Р. з., не имеющей специального замедления срабатывания, приходится принимать несколько меньшей защищаемого участка, поскольку, например, устройство 1 не способно различить КЗ в точках K1 и K2. Последние ступени Р. з. (в Р. з., показанной на рис. 1, — третьи) — резервные, у них часто нет четко ограниченной зоны срабатывания.
В сетях, в которых ток к месту КЗ может идти с двух сторон (от разных источников питания или по обходной связи), относительно селективные Р. з. выполняют направленными — срабатывающими только тогда, когда мощность КЗ передаётся через защищаемые элементы в условном направлении от шин ближайшей подстанции в линию. Так, при КЗ в точке К (рис. 2) могут сработать только устройства 1, 3, 4 и 6. При этом устройства 1 и 3 (4 и 6) для обеспечения селективности согласованы между собой по зонам срабатывания и выдержкам времени.
В ряде случаев — на достаточно мощных генераторах, трансформаторах, линиях напряжением 110 кв и выше — для обеспечения высокого быстродействия Р. з. применяют сравнительно сложные абсолютно селективные защиты. Из них наиболее распространены т. н. продольные защиты, к которым для распознавания КЗ, в конце "своего" и в начале смежного участков подводится информация с разных концов элемента. Так, продольная дифференциальная токовая защита реагирует на геометрическую разность векторов токов на концах элемента. Эта разность при внешнем КЗ теоретически равна нулю, а при внутреннем — току в месте КЗ. В защитах др. типов производится сопоставление фаз векторов тока (дифференциально-фазная защита) или направлений потока мощности на концах элемента. К продольным защитам электрических машин и линий длиной примерно до 10 км информация об изменении электрических величин поступает непосредственно по соединительным проводам. На более длинных линиях для передачи такой информации обычно используют ВЧ каналы связи по проводам самой линии, а также УКВ каналы радиосвязи и радиорелейные линии.
Э. П. Смирнов.
[БСЭ, 1969-1978]НАЗНАЧЕНИЕ РЕЛЕЙНОЙ ЗАЩИТЫ
В энергетических системах могут возникать повреждения и ненормальные режимы работы электрооборудования электростанций и подстанций, их распределительных устройств, линий электропередачи и электроустановок потребителей электрической энергии.
Повреждения в большинстве случаев сопровождаются значительным увеличением тока и глубоким понижением напряжения в элементах энергосистемы.
Повышенный ток выделяет большое количество тепла, вызывающее разрушения в месте повреждения и опасный нагрев неповрежденных линий и оборудования, по которым этот ток проходит.
Понижение напряжения нарушает нормальную работу потребителей электроэнергии и устойчивость параллельной работы генераторов и энергосистемы в целом.
Ненормальные режимы обычно приводят к отклонению величин напряжения, тока и частоты от допустимых значений. При понижении частоты и напряжения создается опасность нарушения нормальной работы потребителей и устойчивости энергосистемы, а повышение напряжения и тока угрожает повреждением оборудования и линий электропередачи.
Таким образом, повреждения нарушают работу энергосистемы и потребителей электроэнергии, а ненормальные режимы создают возможность возникновения повреждений или расстройства работы энергосистемы.
Для обеспечения нормальной работы энергетической системы и потребителей электроэнергии необходимо возможно быстрее выявлять и отделять место повреждения от неповрежденной сети, восстанавливая таким путем нормальные условия их работы и прекращая разрушения в месте повреждения.
Опасные последствия ненормальных режимов также можно предотвратить, если своевременно обнаружить отклонение от нормального режима и принять меры к его устранению (например, снизить ток при его возрастании, понизить напряжение при его увеличении и т. д.).
В связи с этим возникает необходимость в создании и применении автоматических устройств, выполняющих указанные операции и защищающих систему и ее элементы от опасных последствий повреждений и ненормальных режимов.
Первоначально в качестве подобной защиты применялись плавкие предохранители. Однако по мере роста мощности и напряжения электрических установок и усложнения их схем коммутации такой способ защиты стал недостаточным, в силу чего были созданы защитные устройства, выполняемые при помощи специальных автоматов — реле, получившие название релейной защиты.
Релейная защита является основным видом электрической автоматики, без которой невозможна нормальная и надежная работа современных энергетических систем. Она осуществляет непрерывный контроль за состоянием и режимом работы всех элементов энергосистемы и реагирует на возникновение повреждений и ненормальных режимов.
При возникновении повреждений защита выявляет и отключает от системы поврежденный участок, воздействуя на специальные силовые выключатели, предназначенные для размыкания токов повреждения.
При возникновении ненормальных режимов защита выявляет их и в зависимости от характера нарушения производит операции, необходимые для восстановления нормального режима, или подает сигнал дежурному персоналу.
В современных электрических системах релейная защита тесно связана с электрической автоматикой, предназначенной для быстрого автоматического восстановления нормального режима и питания потребителей.
К основным устройствам такой автоматики относятся:- автоматы повторного включения (АПВ),
- автоматы включения резервных источников питания и оборудования (АВР),
- автоматы частотной разгрузки (АЧР).
[Чернобровов Н. В. Релейная защита. Учебное пособие для техникумов]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > protection relay
18 protective relaying
защита
Совокупность устройств, предназначенных для обнаружения повреждений или других анормальных режимов в энергосистеме, отключения повреждения, прекращения анормальных режимов и подачи команд или сигналов.
Примечания:
1) Термин «защита» является общим термином для устройств защиты или систем защиты.
2) Термин «защита» может употребляться для описания защиты целой энергосистемы или защиты отдельной установки в энергосистеме, например: защита трансформатора, защита линии, защита генератора.
3) Защита не включает в себя оборудование установки энергосистемы, предназначенное, например, для ограничения перенапряжений в энергосистеме. Однако, она включает в себя оборудование, предназначенное для управления отклонениями напряжения или частоты в энергосистеме, такое как оборудование для автоматического управления реакторами для автоматической разгрузки и т.п.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
релейная защита
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]
релейная защита
релейная защита электрических систем
Совокупность устройств (или отдельное устройство), содержащая реле и способная реагировать на короткие замыкания (КЗ) в различных элементах электрической системы — автоматически выявлять и отключать поврежденный участок. В ряде случаев Р. з. может реагировать и на др. нарушения нормального режима работы системы (например, на повышение тока, напряжения) — включать сигнализацию или (реже) отключать соответствующий элемент системы. КЗ — основной вид повреждений в электрических системах как по частоте возникновения, так и по масштабам отрицательных последствий. При КЗ наступает резкое и неравномерное понижение напряжения в системе и значительное увеличение тока в отдельных её элементах, что в конечном счёте может привести к прекращению электроснабжения потребителей и разрушению оборудования. Применение Р. з. сводит вредные последствия КЗ к минимуму.
Р. з. срабатывает при изменениях определённых электрических величин. Чаще всего встречается Р. з., реагирующая на повышение тока (токовая защита). Нередко в качестве воздействующей величины используют напряжение. Применяют также Р. з., реагирующую на снижение отношения напряжения к току, которое пропорционально расстоянию (дистанции) от Р. з. до места КЗ (дистанционная защита). Обычно устройства Р. з. изолированы от системы; информация об электрических величинах поступает на них от измерительных трансформаторов тока или напряжения либо от др. измерительных преобразователей.
Как правило, каждый элемент электрической системы (генератор, трансформатор, линию электропередачи и т.д.) оборудуют отдельными устройствами Р. з. Защита системы в целом обеспечивается комплексной селективной Р. з., при этом отключение поврежденного элемента осуществляется вполне определённым устройством Р. з., а остальные устройства, получая информацию о КЗ, не срабатывают. Такая Р. з. должна срабатывать при КЗ, внутренних по отношению к защищаемому элементу, не срабатывать при внешних, а также не срабатывать в отсутствии КЗ.
Селективность (избирательность) Р. з. характеризуется протяжённостью зоны срабатывания защиты (при КЗ в пределах этой зоны Р. з. срабатывает с заданным быстродействием) и видами режимов работы системы, при которых предусматривается её несрабатывание. В зависимости от уровня селективности при внешних КЗ принято делить Р. з. на абсолютно селективные, не срабатывающие при любых внешних КЗ, относительно селективные, срабатывание которых при внешних КЗ предусмотрено только в случае отказа защиты или выключателя смежного поврежденного элемента, и неселективные, срабатывание которых допускается (в целях упрощения) при внешних КЗ в границах некоторой зоны. Наиболее распространены относительно селективные Р. з. Любая Р. з. должна удовлетворять требованиям устойчивости функционирования, характеризующейся совершенством способов "распознавания" защитой режима работы электрической системы, и надёжности функционирования, определяющейся в первую очередь отсутствием отказов устройств Р. з.
Один из простейших путей достижения селективности Р. з. (обычно токовых и дистанционных) — применение реле, в которых между моментом возникновения требования о срабатывании реле и завершением процесса срабатывания проходит строго определённый промежуток времени, называется выдержкой времени (см. Реле времени).
На рис. 1 показаны схема участка радиальной электрической сети с односторонним питанием (при котором ток к месту КЗ идёт с одной стороны), оснащенного относительно селективной Р. з., и соответствующие выдержки времени. Устройства Р. з. 1 и 2 имеют по три ступени, каждая из которых настроена на определённые значения входного сигнала т. о., что выдержка времени этих устройств ступенчато зависит от расстояния до места КЗ. Протяжённость зон, защищаемых отдельными ступенями, и соответствующие им выдержки времени выбираются с таким расчётом, чтобы устройства защиты поврежденных участков сети срабатывали раньше др. устройств. Зону первой ступени Р. з., не имеющей специального замедления срабатывания, приходится принимать несколько меньшей защищаемого участка, поскольку, например, устройство 1 не способно различить КЗ в точках K1 и K2. Последние ступени Р. з. (в Р. з., показанной на рис. 1, — третьи) — резервные, у них часто нет четко ограниченной зоны срабатывания.
В сетях, в которых ток к месту КЗ может идти с двух сторон (от разных источников питания или по обходной связи), относительно селективные Р. з. выполняют направленными — срабатывающими только тогда, когда мощность КЗ передаётся через защищаемые элементы в условном направлении от шин ближайшей подстанции в линию. Так, при КЗ в точке К (рис. 2) могут сработать только устройства 1, 3, 4 и 6. При этом устройства 1 и 3 (4 и 6) для обеспечения селективности согласованы между собой по зонам срабатывания и выдержкам времени.
В ряде случаев — на достаточно мощных генераторах, трансформаторах, линиях напряжением 110 кв и выше — для обеспечения высокого быстродействия Р. з. применяют сравнительно сложные абсолютно селективные защиты. Из них наиболее распространены т. н. продольные защиты, к которым для распознавания КЗ, в конце "своего" и в начале смежного участков подводится информация с разных концов элемента. Так, продольная дифференциальная токовая защита реагирует на геометрическую разность векторов токов на концах элемента. Эта разность при внешнем КЗ теоретически равна нулю, а при внутреннем — току в месте КЗ. В защитах др. типов производится сопоставление фаз векторов тока (дифференциально-фазная защита) или направлений потока мощности на концах элемента. К продольным защитам электрических машин и линий длиной примерно до 10 км информация об изменении электрических величин поступает непосредственно по соединительным проводам. На более длинных линиях для передачи такой информации обычно используют ВЧ каналы связи по проводам самой линии, а также УКВ каналы радиосвязи и радиорелейные линии.
Э. П. Смирнов.
[БСЭ, 1969-1978]НАЗНАЧЕНИЕ РЕЛЕЙНОЙ ЗАЩИТЫ
В энергетических системах могут возникать повреждения и ненормальные режимы работы электрооборудования электростанций и подстанций, их распределительных устройств, линий электропередачи и электроустановок потребителей электрической энергии.
Повреждения в большинстве случаев сопровождаются значительным увеличением тока и глубоким понижением напряжения в элементах энергосистемы.
Повышенный ток выделяет большое количество тепла, вызывающее разрушения в месте повреждения и опасный нагрев неповрежденных линий и оборудования, по которым этот ток проходит.
Понижение напряжения нарушает нормальную работу потребителей электроэнергии и устойчивость параллельной работы генераторов и энергосистемы в целом.
Ненормальные режимы обычно приводят к отклонению величин напряжения, тока и частоты от допустимых значений. При понижении частоты и напряжения создается опасность нарушения нормальной работы потребителей и устойчивости энергосистемы, а повышение напряжения и тока угрожает повреждением оборудования и линий электропередачи.
Таким образом, повреждения нарушают работу энергосистемы и потребителей электроэнергии, а ненормальные режимы создают возможность возникновения повреждений или расстройства работы энергосистемы.
Для обеспечения нормальной работы энергетической системы и потребителей электроэнергии необходимо возможно быстрее выявлять и отделять место повреждения от неповрежденной сети, восстанавливая таким путем нормальные условия их работы и прекращая разрушения в месте повреждения.
Опасные последствия ненормальных режимов также можно предотвратить, если своевременно обнаружить отклонение от нормального режима и принять меры к его устранению (например, снизить ток при его возрастании, понизить напряжение при его увеличении и т. д.).
В связи с этим возникает необходимость в создании и применении автоматических устройств, выполняющих указанные операции и защищающих систему и ее элементы от опасных последствий повреждений и ненормальных режимов.
Первоначально в качестве подобной защиты применялись плавкие предохранители. Однако по мере роста мощности и напряжения электрических установок и усложнения их схем коммутации такой способ защиты стал недостаточным, в силу чего были созданы защитные устройства, выполняемые при помощи специальных автоматов — реле, получившие название релейной защиты.
Релейная защита является основным видом электрической автоматики, без которой невозможна нормальная и надежная работа современных энергетических систем. Она осуществляет непрерывный контроль за состоянием и режимом работы всех элементов энергосистемы и реагирует на возникновение повреждений и ненормальных режимов.
При возникновении повреждений защита выявляет и отключает от системы поврежденный участок, воздействуя на специальные силовые выключатели, предназначенные для размыкания токов повреждения.
При возникновении ненормальных режимов защита выявляет их и в зависимости от характера нарушения производит операции, необходимые для восстановления нормального режима, или подает сигнал дежурному персоналу.
В современных электрических системах релейная защита тесно связана с электрической автоматикой, предназначенной для быстрого автоматического восстановления нормального режима и питания потребителей.
К основным устройствам такой автоматики относятся:- автоматы повторного включения (АПВ),
- автоматы включения резервных источников питания и оборудования (АВР),
- автоматы частотной разгрузки (АЧР).
[Чернобровов Н. В. Релейная защита. Учебное пособие для техникумов]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > protective relaying
19 relay protection
защита
Совокупность устройств, предназначенных для обнаружения повреждений или других анормальных режимов в энергосистеме, отключения повреждения, прекращения анормальных режимов и подачи команд или сигналов.
Примечания:
1) Термин «защита» является общим термином для устройств защиты или систем защиты.
2) Термин «защита» может употребляться для описания защиты целой энергосистемы или защиты отдельной установки в энергосистеме, например: защита трансформатора, защита линии, защита генератора.
3) Защита не включает в себя оборудование установки энергосистемы, предназначенное, например, для ограничения перенапряжений в энергосистеме. Однако, она включает в себя оборудование, предназначенное для управления отклонениями напряжения или частоты в энергосистеме, такое как оборудование для автоматического управления реакторами для автоматической разгрузки и т.п.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
релейная защита
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]
релейная защита
релейная защита электрических систем
Совокупность устройств (или отдельное устройство), содержащая реле и способная реагировать на короткие замыкания (КЗ) в различных элементах электрической системы — автоматически выявлять и отключать поврежденный участок. В ряде случаев Р. з. может реагировать и на др. нарушения нормального режима работы системы (например, на повышение тока, напряжения) — включать сигнализацию или (реже) отключать соответствующий элемент системы. КЗ — основной вид повреждений в электрических системах как по частоте возникновения, так и по масштабам отрицательных последствий. При КЗ наступает резкое и неравномерное понижение напряжения в системе и значительное увеличение тока в отдельных её элементах, что в конечном счёте может привести к прекращению электроснабжения потребителей и разрушению оборудования. Применение Р. з. сводит вредные последствия КЗ к минимуму.
Р. з. срабатывает при изменениях определённых электрических величин. Чаще всего встречается Р. з., реагирующая на повышение тока (токовая защита). Нередко в качестве воздействующей величины используют напряжение. Применяют также Р. з., реагирующую на снижение отношения напряжения к току, которое пропорционально расстоянию (дистанции) от Р. з. до места КЗ (дистанционная защита). Обычно устройства Р. з. изолированы от системы; информация об электрических величинах поступает на них от измерительных трансформаторов тока или напряжения либо от др. измерительных преобразователей.
Как правило, каждый элемент электрической системы (генератор, трансформатор, линию электропередачи и т.д.) оборудуют отдельными устройствами Р. з. Защита системы в целом обеспечивается комплексной селективной Р. з., при этом отключение поврежденного элемента осуществляется вполне определённым устройством Р. з., а остальные устройства, получая информацию о КЗ, не срабатывают. Такая Р. з. должна срабатывать при КЗ, внутренних по отношению к защищаемому элементу, не срабатывать при внешних, а также не срабатывать в отсутствии КЗ.
Селективность (избирательность) Р. з. характеризуется протяжённостью зоны срабатывания защиты (при КЗ в пределах этой зоны Р. з. срабатывает с заданным быстродействием) и видами режимов работы системы, при которых предусматривается её несрабатывание. В зависимости от уровня селективности при внешних КЗ принято делить Р. з. на абсолютно селективные, не срабатывающие при любых внешних КЗ, относительно селективные, срабатывание которых при внешних КЗ предусмотрено только в случае отказа защиты или выключателя смежного поврежденного элемента, и неселективные, срабатывание которых допускается (в целях упрощения) при внешних КЗ в границах некоторой зоны. Наиболее распространены относительно селективные Р. з. Любая Р. з. должна удовлетворять требованиям устойчивости функционирования, характеризующейся совершенством способов "распознавания" защитой режима работы электрической системы, и надёжности функционирования, определяющейся в первую очередь отсутствием отказов устройств Р. з.
Один из простейших путей достижения селективности Р. з. (обычно токовых и дистанционных) — применение реле, в которых между моментом возникновения требования о срабатывании реле и завершением процесса срабатывания проходит строго определённый промежуток времени, называется выдержкой времени (см. Реле времени).
На рис. 1 показаны схема участка радиальной электрической сети с односторонним питанием (при котором ток к месту КЗ идёт с одной стороны), оснащенного относительно селективной Р. з., и соответствующие выдержки времени. Устройства Р. з. 1 и 2 имеют по три ступени, каждая из которых настроена на определённые значения входного сигнала т. о., что выдержка времени этих устройств ступенчато зависит от расстояния до места КЗ. Протяжённость зон, защищаемых отдельными ступенями, и соответствующие им выдержки времени выбираются с таким расчётом, чтобы устройства защиты поврежденных участков сети срабатывали раньше др. устройств. Зону первой ступени Р. з., не имеющей специального замедления срабатывания, приходится принимать несколько меньшей защищаемого участка, поскольку, например, устройство 1 не способно различить КЗ в точках K1 и K2. Последние ступени Р. з. (в Р. з., показанной на рис. 1, — третьи) — резервные, у них часто нет четко ограниченной зоны срабатывания.
В сетях, в которых ток к месту КЗ может идти с двух сторон (от разных источников питания или по обходной связи), относительно селективные Р. з. выполняют направленными — срабатывающими только тогда, когда мощность КЗ передаётся через защищаемые элементы в условном направлении от шин ближайшей подстанции в линию. Так, при КЗ в точке К (рис. 2) могут сработать только устройства 1, 3, 4 и 6. При этом устройства 1 и 3 (4 и 6) для обеспечения селективности согласованы между собой по зонам срабатывания и выдержкам времени.
В ряде случаев — на достаточно мощных генераторах, трансформаторах, линиях напряжением 110 кв и выше — для обеспечения высокого быстродействия Р. з. применяют сравнительно сложные абсолютно селективные защиты. Из них наиболее распространены т. н. продольные защиты, к которым для распознавания КЗ, в конце "своего" и в начале смежного участков подводится информация с разных концов элемента. Так, продольная дифференциальная токовая защита реагирует на геометрическую разность векторов токов на концах элемента. Эта разность при внешнем КЗ теоретически равна нулю, а при внутреннем — току в месте КЗ. В защитах др. типов производится сопоставление фаз векторов тока (дифференциально-фазная защита) или направлений потока мощности на концах элемента. К продольным защитам электрических машин и линий длиной примерно до 10 км информация об изменении электрических величин поступает непосредственно по соединительным проводам. На более длинных линиях для передачи такой информации обычно используют ВЧ каналы связи по проводам самой линии, а также УКВ каналы радиосвязи и радиорелейные линии.
Э. П. Смирнов.
[БСЭ, 1969-1978]НАЗНАЧЕНИЕ РЕЛЕЙНОЙ ЗАЩИТЫ
В энергетических системах могут возникать повреждения и ненормальные режимы работы электрооборудования электростанций и подстанций, их распределительных устройств, линий электропередачи и электроустановок потребителей электрической энергии.
Повреждения в большинстве случаев сопровождаются значительным увеличением тока и глубоким понижением напряжения в элементах энергосистемы.
Повышенный ток выделяет большое количество тепла, вызывающее разрушения в месте повреждения и опасный нагрев неповрежденных линий и оборудования, по которым этот ток проходит.
Понижение напряжения нарушает нормальную работу потребителей электроэнергии и устойчивость параллельной работы генераторов и энергосистемы в целом.
Ненормальные режимы обычно приводят к отклонению величин напряжения, тока и частоты от допустимых значений. При понижении частоты и напряжения создается опасность нарушения нормальной работы потребителей и устойчивости энергосистемы, а повышение напряжения и тока угрожает повреждением оборудования и линий электропередачи.
Таким образом, повреждения нарушают работу энергосистемы и потребителей электроэнергии, а ненормальные режимы создают возможность возникновения повреждений или расстройства работы энергосистемы.
Для обеспечения нормальной работы энергетической системы и потребителей электроэнергии необходимо возможно быстрее выявлять и отделять место повреждения от неповрежденной сети, восстанавливая таким путем нормальные условия их работы и прекращая разрушения в месте повреждения.
Опасные последствия ненормальных режимов также можно предотвратить, если своевременно обнаружить отклонение от нормального режима и принять меры к его устранению (например, снизить ток при его возрастании, понизить напряжение при его увеличении и т. д.).
В связи с этим возникает необходимость в создании и применении автоматических устройств, выполняющих указанные операции и защищающих систему и ее элементы от опасных последствий повреждений и ненормальных режимов.
Первоначально в качестве подобной защиты применялись плавкие предохранители. Однако по мере роста мощности и напряжения электрических установок и усложнения их схем коммутации такой способ защиты стал недостаточным, в силу чего были созданы защитные устройства, выполняемые при помощи специальных автоматов — реле, получившие название релейной защиты.
Релейная защита является основным видом электрической автоматики, без которой невозможна нормальная и надежная работа современных энергетических систем. Она осуществляет непрерывный контроль за состоянием и режимом работы всех элементов энергосистемы и реагирует на возникновение повреждений и ненормальных режимов.
При возникновении повреждений защита выявляет и отключает от системы поврежденный участок, воздействуя на специальные силовые выключатели, предназначенные для размыкания токов повреждения.
При возникновении ненормальных режимов защита выявляет их и в зависимости от характера нарушения производит операции, необходимые для восстановления нормального режима, или подает сигнал дежурному персоналу.
В современных электрических системах релейная защита тесно связана с электрической автоматикой, предназначенной для быстрого автоматического восстановления нормального режима и питания потребителей.
К основным устройствам такой автоматики относятся:- автоматы повторного включения (АПВ),
- автоматы включения резервных источников питания и оборудования (АВР),
- автоматы частотной разгрузки (АЧР).
[Чернобровов Н. В. Релейная защита. Учебное пособие для техникумов]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > relay protection
См. также в других словарях:
схема — 2.59 схема (schema): Описание содержания, структуры и ограничений, используемых для создания и поддержки базы данных. Источник: ГОСТ Р ИСО/МЭК ТО 10032 2007: Эталонная модель управления данными 3.1.17 схема : Документ, на котором показаны в виде… … Словарь-справочник терминов нормативно-технической документации
СХЕМА ЗЕМЛЕУСТРОЙСТВА — предпроектная разработка системы рацион. использования и комплексной охраны зем. ресурсов, общей организации территории области (края, авт. республики) или р на на долгосрочную перспективу. Заказчик С. з. госагропромы союзных республик и… … Сельско-хозяйственный энциклопедический словарь
схема землеустройства — схема землеустройства, предпроектная разработка системы рацион. использования и комплексной охраны земельных ресурсов, общей организации территории области (края, автономной республики) или района на долгосрочную перспективу. Заказчик… … Сельское хозяйство. Большой энциклопедический словарь
Технологическая схема горнодобывающего предприятия — (a. flowsheet of a mine; н. technologisches Schema eines Bergwerk; ф. schema technologique de l entreprise miniere; и. esquema technologica de empresa minera) совокупность осн. и вспомогат. производств. процессов в сочетании с… … Геологическая энциклопедия
Столбовые системы разработки — (a. pillar mining, longwall retreating; н. Pfeilerbau, Strebbau als Ruckbau; ф. methode d exploitation par piliers longs, methode d exploitation par massifs, metode d exploitation par panneaux; и. sistema de exploration por paneles y… … Геологическая энциклопедия
агрегат комплексной обработки стали (АКОС) — [complex steel treatment plant] многофункциональная установка, включающая разнообразный набор оборудования, позволяющего выполнять в сталеразливочном ковше доводку металла по химическому составу введением кусковых ферросплавов, раскисление,… … Энциклопедический словарь по металлургии
Печатная схема — узел электро или радиоаппаратуры, выполненный на одной плате (См. Плата) в виде системы печатных электро и радиоэлементов, соединённых между собой способом печатного монтажа (См. Печатный монтаж). В печатном исполнении изготавливают… … Большая советская энциклопедия
Безопасность эксплуатации ракетного вооружения — Схема комплексной системы мер по обеспечению безопасной и безаварийной эксплуатации ракетного вооружения Состояние защищенности жизненно важных интересов личности и общества от происшествий на ракетном вооружении (РВО), а также свойство системы… … Энциклопедия РВСН
система — 4.48 система (system): Комбинация взаимодействующих элементов, организованных для достижения одной или нескольких поставленных целей. Примечание 1 Система может рассматриваться как продукт или предоставляемые им услуги. Примечание 2 На практике… … Словарь-справочник терминов нормативно-технической документации
Государственная программа — (Government program) Государственная программа это инструмент государственного регулирования экономики, обеспечивающий достижение перспективных целей Понятие государственной программы, виды государственных федеральных и муниципальных программ,… … Энциклопедия инвестора
СНиП 11-04-2003: Инструкция о порядке разработки, согласования, экспертизы и утверждения градостроительной документации — Терминология СНиП 11 04 2003: Инструкция о порядке разработки, согласования, экспертизы и утверждения градостроительной документации: 6. На генеральном плане застройки показываются все сохраняемые, реконструируемые и проектируемые здания и… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский